
Portfolio
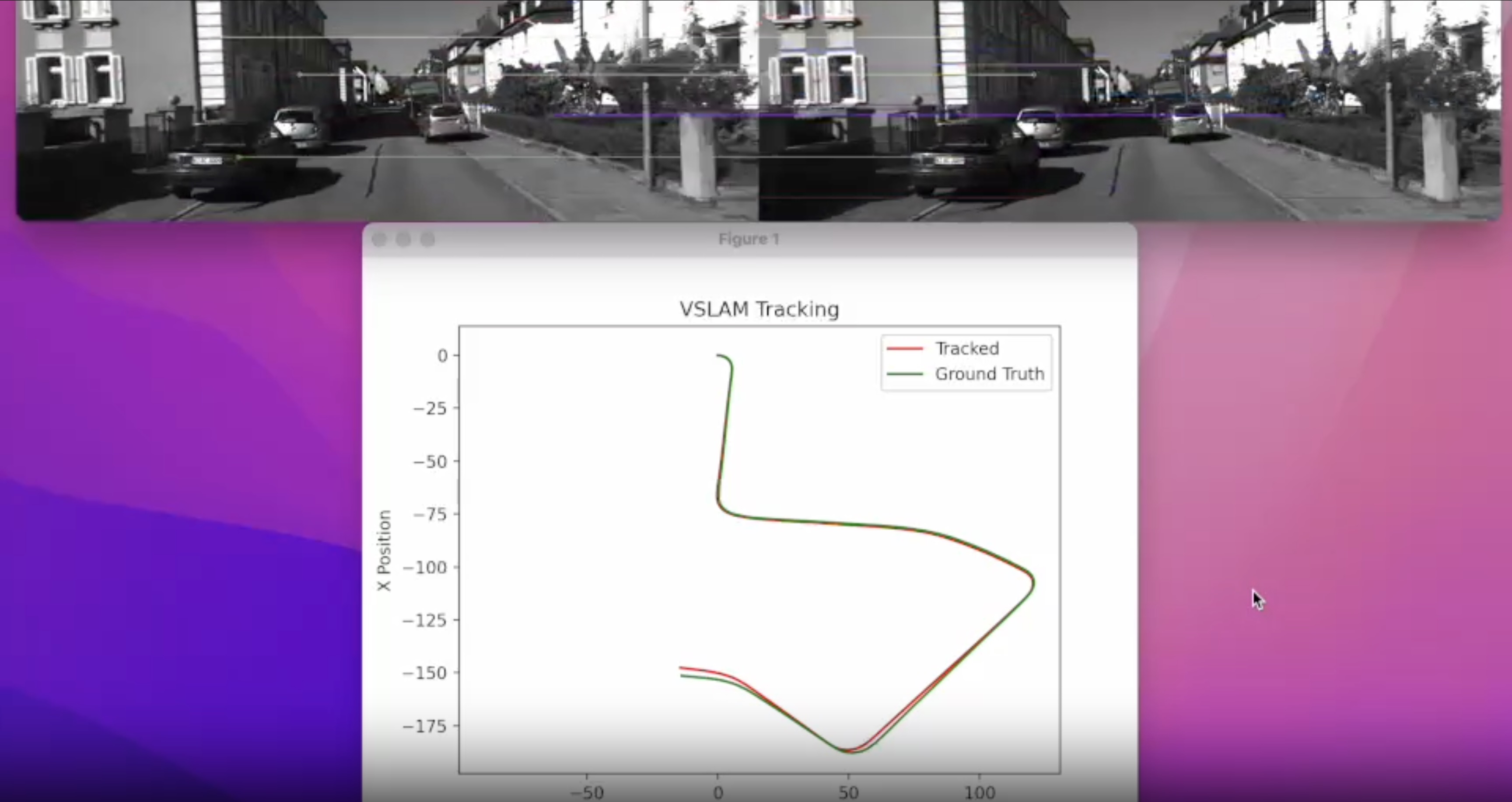
VSLAM: Stereo Visual SLAM Pipeline
Pure-Python stereo SLAM pipeline (KITTI-compatible) with feature tracking, stereo matching, PnP/ICP motion estimation, and bundle adjustment.
Read more →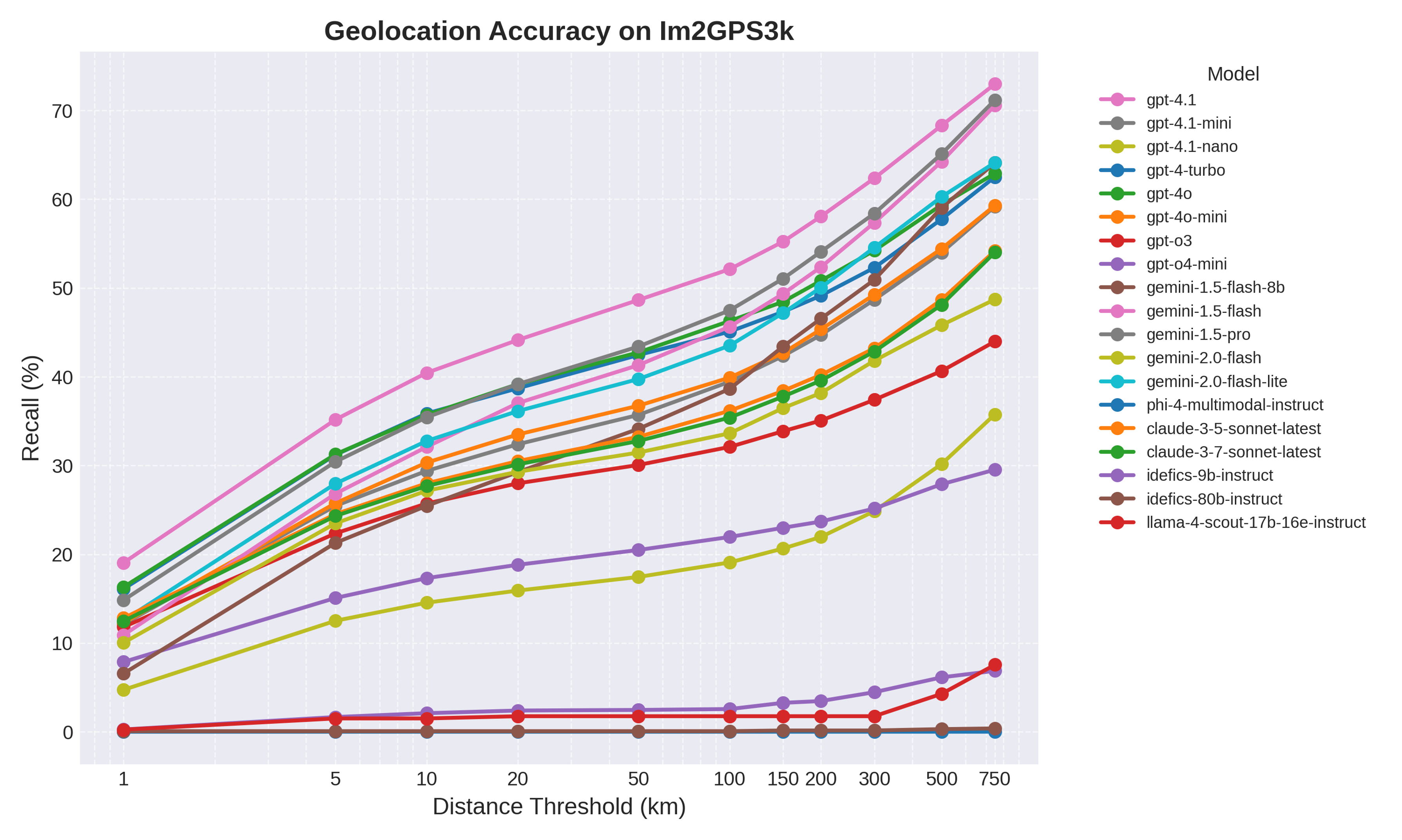
VLM Geolocation: Privacy Risks of Vision-Language Models
Systematic evaluation of 25+ VLMs for geolocation, revealing privacy risks. Developed mitigation techniques reducing accuracy by 40%. Published at AAAI 2025.
Read more →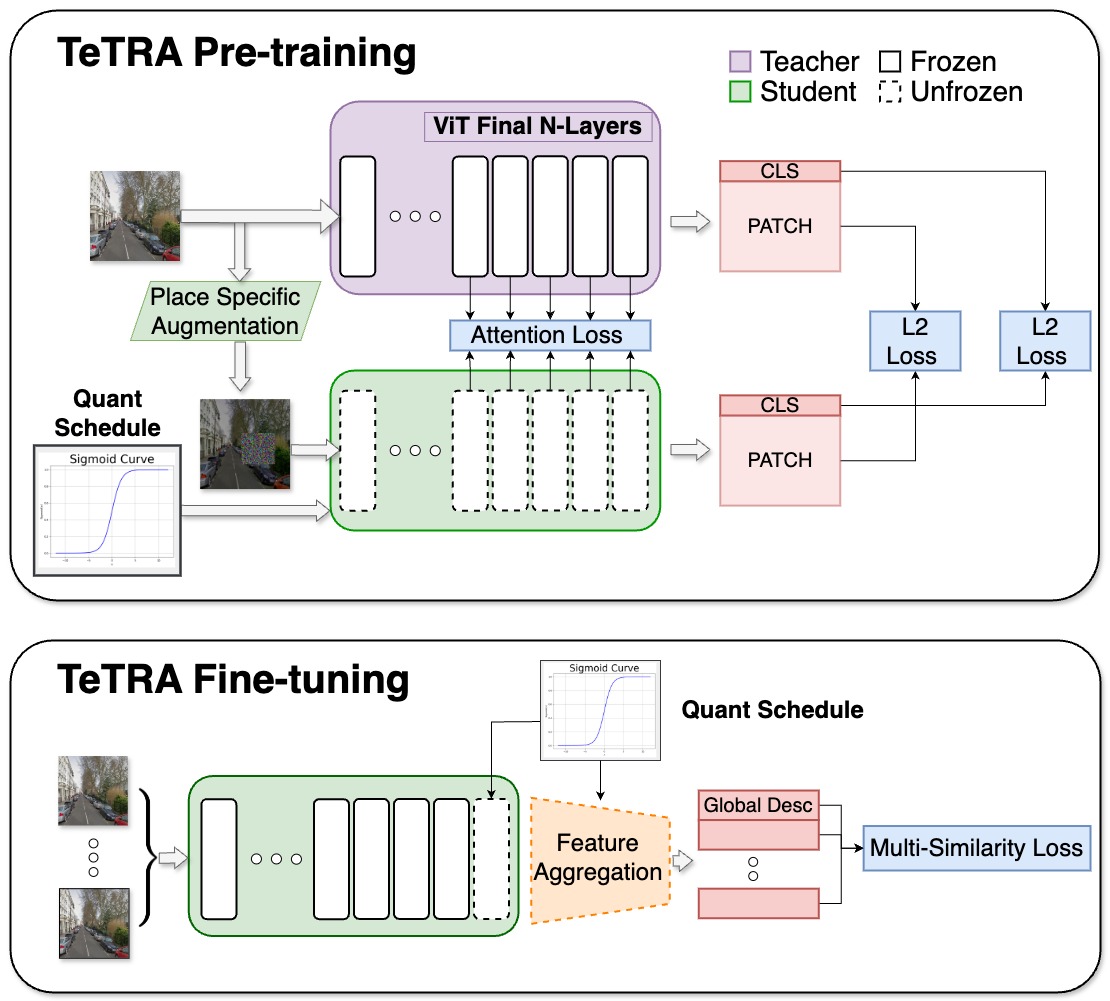
TeTRA-VPR: A Ternary Transformer for Compact Visual Place Recognition
Ternary quantization with progressive distillation achieving 69% memory reduction and 35% lower latency for visual place recognition.
Read more →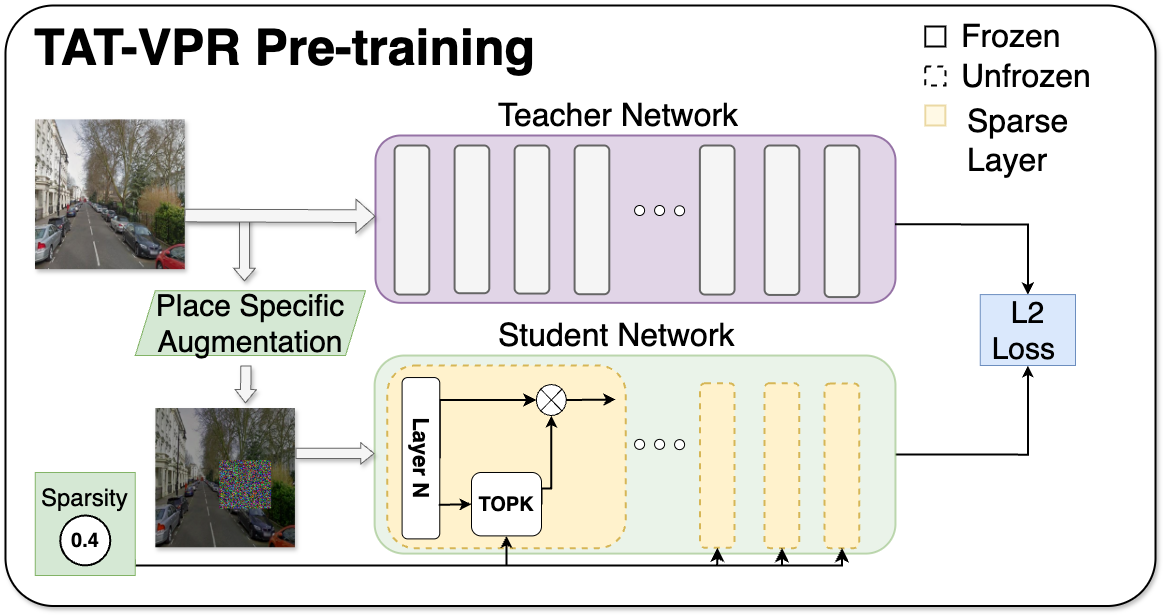
TAT-VPR: Ternary Adaptive Transformer for Dynamic Visual Place Recognition
Adaptive ternary-quantized ViT with runtime accuracy/compute control. 5x model compression and up to 40% operation reduction.
Read more →
RackMind: AI Agent Simulator for Data Centre Optimization
Physics-based data centre simulator for training AI agents to optimize real-world operations. Seven evaluation dimensions across thermal, power, carbon, and ...
Read more →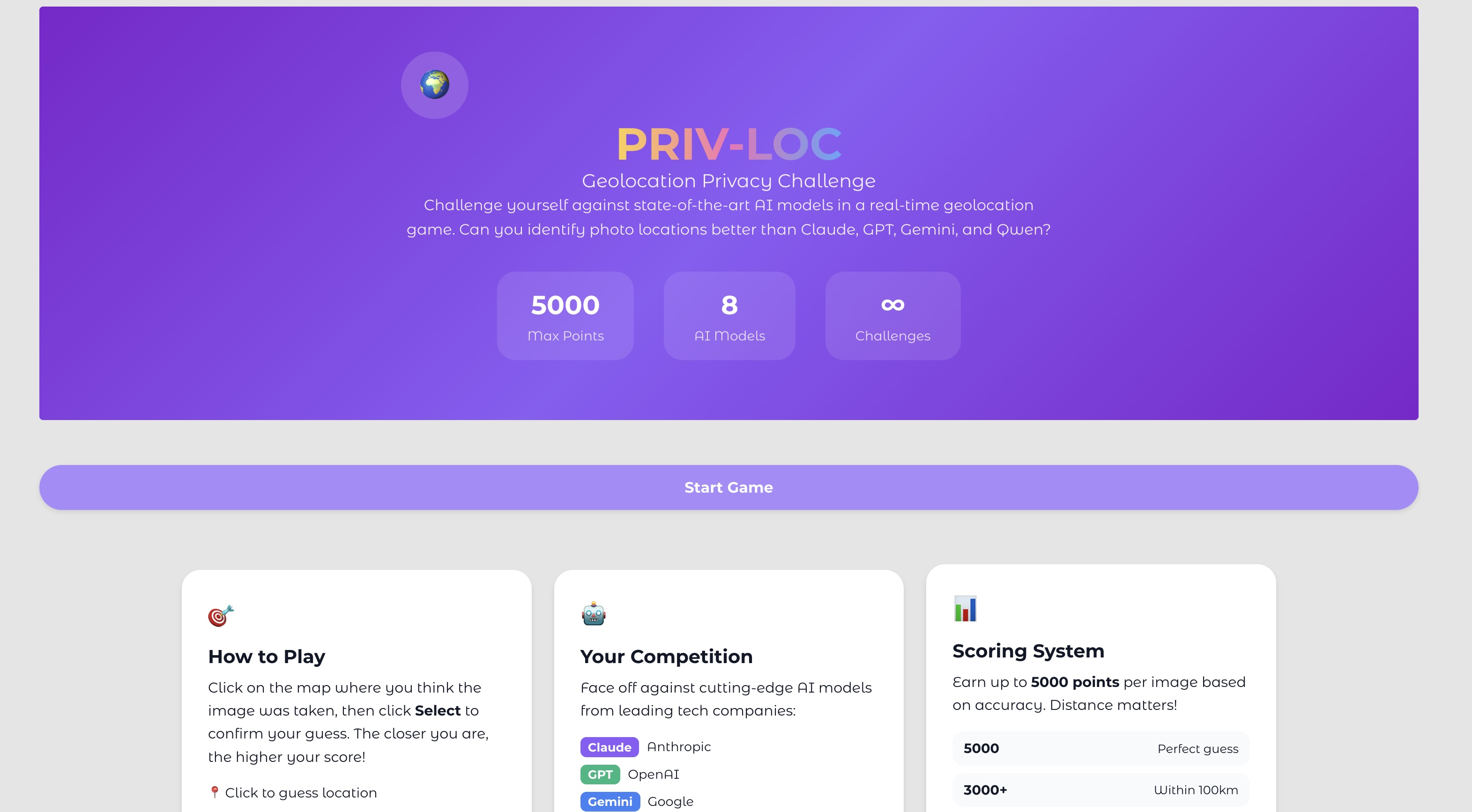
PRIV-LOC Demo: Play GeoGuessr vs Vision-Language Models
Test your place-recognition skills against state-of-the-art VLMs in this interactive GeoGuessr-style game. Built on Hugging Face Spaces.
Read more →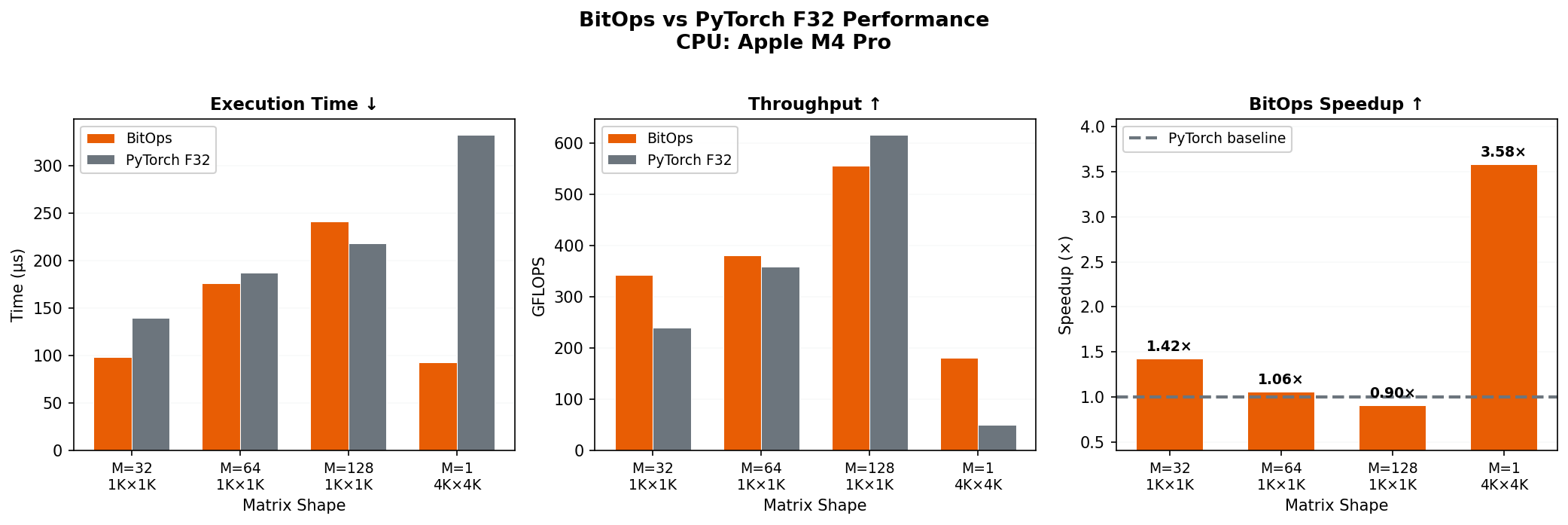
BitOps: High-Performance Ternary Matrix Multiplication
Optimized ternary matmul across ARM NEON, x86 AVX2, and CUDA backends. 16x memory reduction via 2-bit weight packing.
Read more →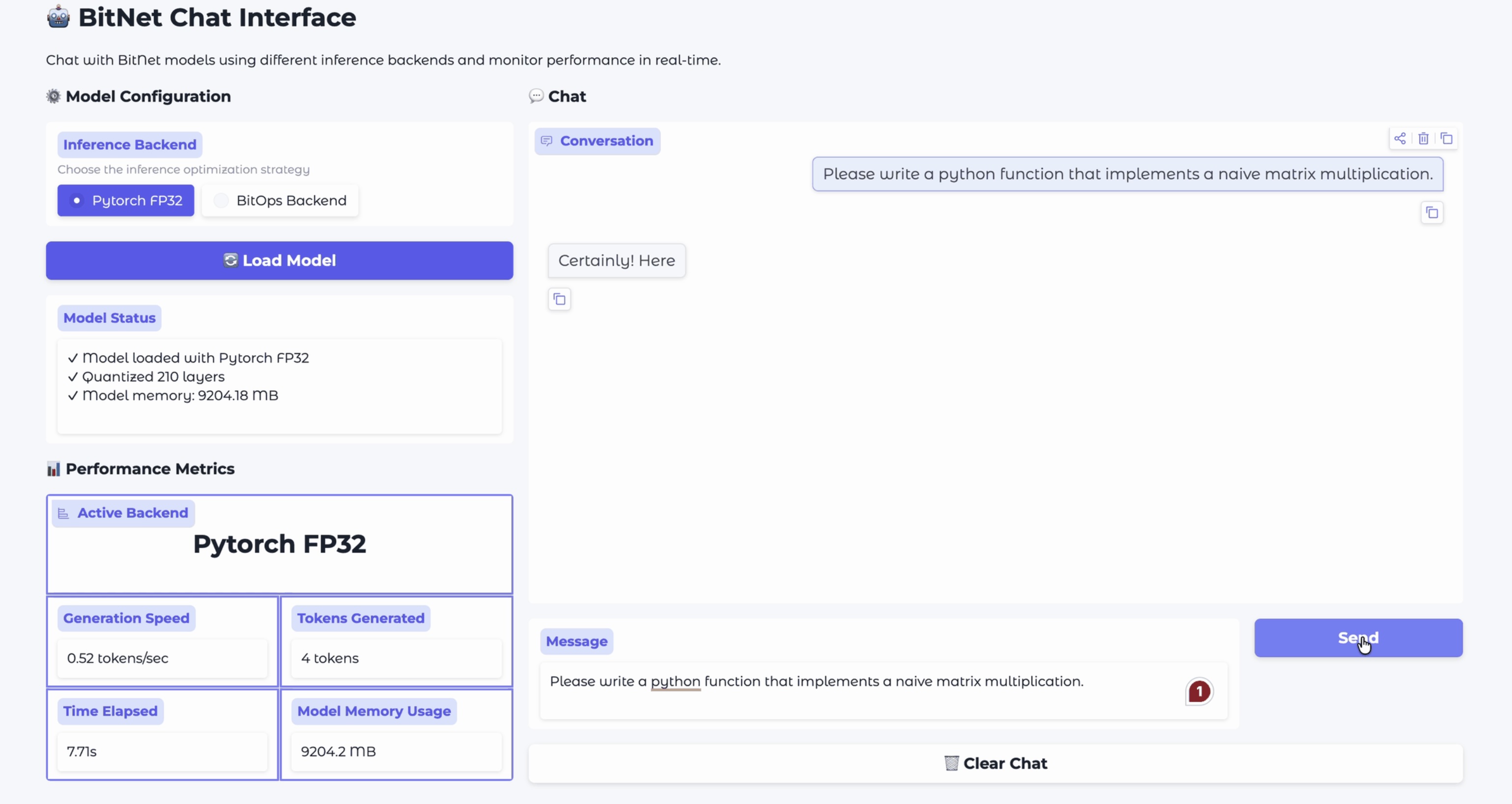
BitNet Chat: Interactive 1.58-bit LLM Demo
Gradio web app for real-time chat with 1.58-bit BitNet models. 24x speedup and 80% memory reduction on ARM M4 vs PyTorch FP32.
Read more →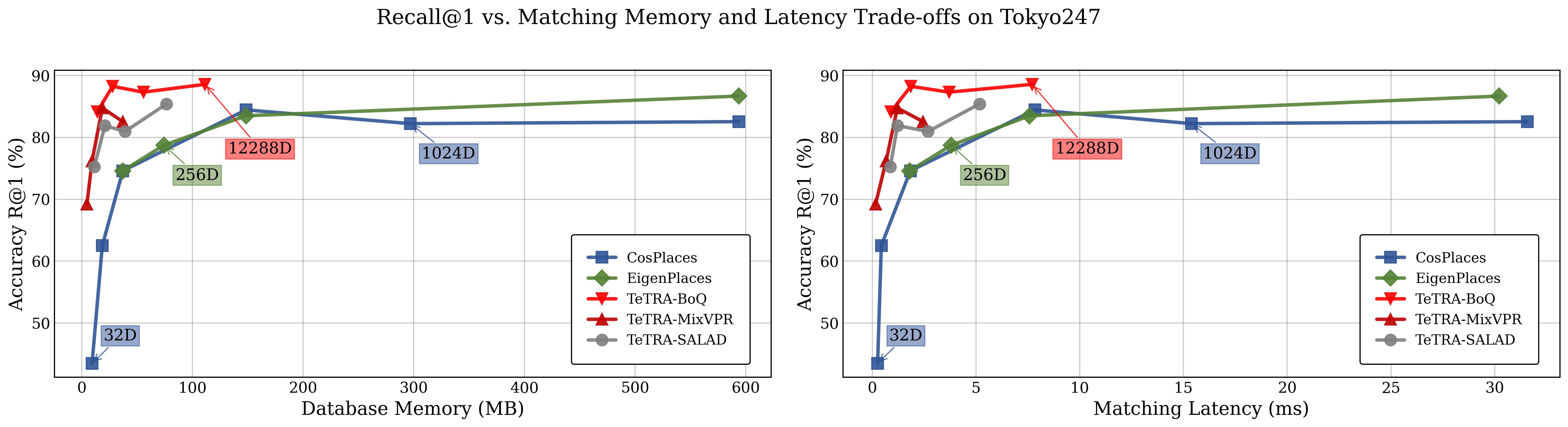
BitCore: Quantization-Aware Training Toolkit
Drop-in ternary linear layers for PyTorch with QAT and seamless BitOps deployment. Supports BitNet, TWN, and ParetoQ for 8x memory savings.
Read more →
Generative AI on Arm: Efficient AI Inference Course
Hands-on course with Arm University covering optimization of generative AI workloads across Arm architectures, with labs spanning mobile, cloud, and edge dep...
Read more →